|
|
I replaced my home built dome with a smaller 6’
dome from technical innovations.
My original had served well for a couple of years but the
base ring had started to get water logged and begun to delaminate.
Also if I wanted automated observing I needed a way to open
and close the shutter remotely.
This the TI dome offered out of the box. |
 |
|
A bigger issue was the noise the motors made.
There was just no way these could be used
in the early hours with out upsetting the rest
of the street.
With help from my wife we set about
reducing this noise.
The way the motors are fixed to the dome
allows the dome to act as a soundboard.
Some heavy weight rubber mats were cut to
go between the motor fixing plates and the dome.
To help insulate sound straight from the
motors the drives were placed within foam
insulation.
Its still ******** loud inside the dome
but better outside
Overall all the TI dome is well built but the
drives are not to the same standard. |
|
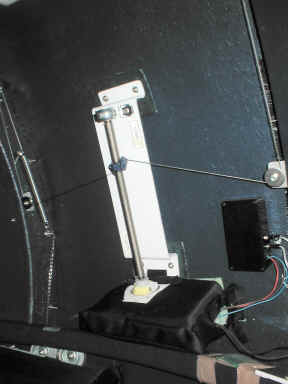
Shutter winding
mechanism. Care!
|
|

In an attempt to save a few quid I didn’t buy
the digital dome works control system from
technical innovation but thought I would build
my own. Its
pretty simple stuff.
The power and polarity of the dome and
shutter driver need to be controlled.
The dome position needs encoding and home
sensed. Also
on the system is a rain detector.
|
|
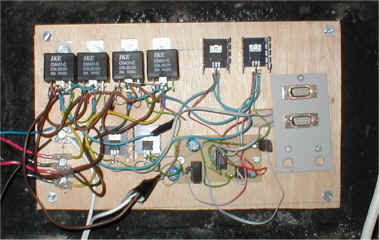
The polarity switching is taken care of by a pair
of 30A 12V car relays.
The power to the relay coils is switched
by a TIP122 transistor.
An addition relay could be used to
control power to the motors but switching a
reasonable current would shorten the life of the
relay contacts.
Instead a pair of MOSFets are used.
At each end of the shutter travel garage
door security magnetic sensors shut off the open
and close power. |
|

The home position is sensed by
shorting across the shutter motor contacts with
a 10K resister.
When the contacts are over there pickup
points 12V is sensed at the source of the MOSFet.
Control is by a hand pad or a PC running
software described later. The control signals are isolated using optical isolators or
in the case of the home sensor a small relay.
|
|

Dome position is encoded by a standard serial
mouse with a large drive wheel running on the
dome base ring. |
|
|